Golang GMP调度器
一、进程与线程
1.进程是操作系统进行资源分配和调度的一个独立单位,不同的进程通过进程间通信来通信。由于进程比较重量,占据独立的内存,所以上下文进程间的切换开销(栈、寄存器、虚拟内存、文件句柄等)比较大,但相对比较稳定安全。
2.线程是进程的一个实体,是CPU调度和分派的基本单位,它是比进程更小的能独立运行的基本单位.线程自己基本上不拥有系统资源,只拥有一点在运行中必不可少的资源(如程序计数器,一组寄存器和栈),但是它可与同属一个进程的其他的线程共享进程所拥有的全部资源。线程间通信主要通过共享内存,上下文切换很快,资源开销较少,但相比进程不够稳定容易丢失数据。
虽然线程比较轻量,但是在调度时也有比较大的额外开销。每个线程会都占用 1 兆以上的内存空间,在对线程进行切换时不止会消耗较多的内存,恢复寄存器中的内容还需要向操作系统申请或者销毁对应的资源,每一次线程上下文的切换都需要消耗 ~1us 左右的时间1,但是 Go 调度器对 Goroutine 的上下文切换约为 ~0.2us,减少了 80% 的额外开销2。
Go 语言的调度器通过使用与 CPU 数量相等的线程减少线程频繁切换的内存开销,同时在每一个线程上执行额外开销更低的 Goroutine 来降低操作系统和硬件的负载。
二、Golang调度器
1.Go 语言的协程 goroutine
Go 为了提供更容易使用的并发方法,使用了 goroutine 和 channel。goroutine 来自协程的概念,让一组可复用的函数运行在一组线程之上,即使有协程阻塞,该线程的其他协程也可以被 runtime 调度,转移到其他可运行的线程上。最关键的是,程序员看不到这些底层的细节,这就降低了编程的难度,提供了更容易的并发。
Go 中,协程被称为 goroutine,它非常轻量,一个 goroutine 只占几 KB,并且这几 KB 就足够 goroutine 运行完,这就能在有限的内存空间内支持大量 goroutine,支持了更多的并发。虽然一个 goroutine 的栈只占几 KB,但实际是可伸缩的,如果需要更多内容,runtime 会自动为 goroutine 分配。
Goroutine 特点:
占用内存更小(几 kb) 调度更灵活 (runtime 调度)
2.调度器历史
今天的 Go 语言调度器有着优异的性能,但是如果我们回头看 Go 语言的 0.x 版本的调度器就会发现最初的调度器不仅实现非常简陋,也无法支撑高并发的服务。调度器经过几个大版本的迭代才有今天的优异性能,几个不同版本的调度器引入了不同的改进,也存在不同的缺陷:
- 单线程调度器 ·0.x
- 只包含 40 多行代码;
- 程序中只能存在一个活跃线程,由 G-M 模型组成;
- 多线程调度器 ·1.0
- 允许运行多线程的程序;
- 全局锁导致竞争严重;
- 任务窃取调度器 ·1.1
- 引入了处理器 P,构成了目前的 G-M-P 模型;
- 在处理器 P 的基础上实现了基于工作窃取的调度器;
- 在某些情况下,Goroutine 不会让出线程,进而造成饥饿问题;
- 时间过长的垃圾回收(Stop-the-world,STW)会导致程序长时间无法工作;
- 抢占式调度器 ·1.2~ 至今
- 基于协作的抢占式调度器 - 1.2 ~ 1.13
- 通过编译器在函数调用时插入抢占检查指令,在函数调用时检查当前 Goroutine 是否发起了抢占请求,实现基于协作的抢占式调度;
- Goroutine 可能会因为垃圾回收和循环长时间占用资源导致程序暂停;
- 基于信号的抢占式调度器 - 1.14 ~ 至今
- 实现基于信号的真抢占式调度;
- 垃圾回收在扫描栈时会触发抢占调度;
- 抢占的时间点不够多,还不能覆盖全部的边缘情况;
- 基于协作的抢占式调度器 - 1.2 ~ 1.13
其中1.1版本之前的调度器未使用GMP模型,2012年之后golang开始引入GMP模型并实现了几个版本的调度器
先来分析被废弃的老版本调度器的设计原理与实现:
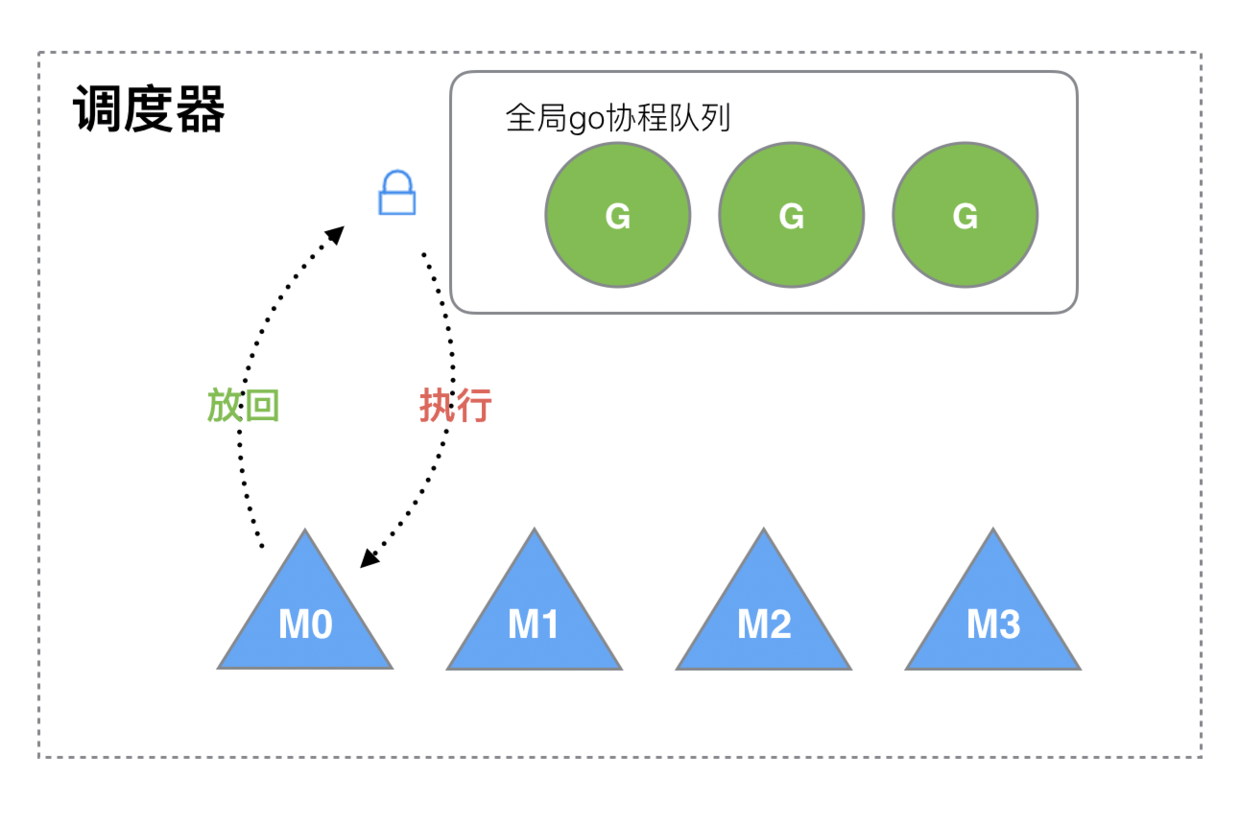
老版本的调度器只存在两个角色,即G&M

老版本的调度器包括0.x的单线程调度器(几乎不可用)和1.0的多线程调度器,总体的实现思路如下(0.x版本只有M0)
 ##### 单线程调度器
##### 单线程调度器
0.x 版本调度器只包含表示 Goroutine 的 G 和表示线程的 M
两种结构,全局也只有一个线程。我们可以在 clean
up scheduler 提交中找到单线程调度器的源代码,在这时 Go 语言的调度器还是由
C 语言实现的,调度函数 runtime.schedule
也只包含 40 多行代码 :
1 | static void scheduler(void) { |
多线程调度器
Go 语言在 1.0
版本正式发布时就支持了多线程的调度器,与上一个版本几乎不可用的调度器相比,Go
语言团队在这一阶段实现了从不可用到可用的跨越。我们可以在 pkg/runtime/proc.c
文件中找到 1.0.1 版本的调度器,多线程版本的调度函数 runtime.schedule
包含 70 多行代码,我们在这里保留了该函数的核心逻辑:
1 | static void schedule(G *gp) { |
整体的逻辑与单线程调度器没有太多区别,因为我们的程序中可能同时存在多个活跃线程,所以多线程调度器引入了
GOMAXPROCS
变量帮助我们灵活控制程序中的最大处理器数,即活跃线程数。
M 想要执行、放回 G 都必须访问全局 G 队列,并且 M 有多个,即多线程访问同一资源需要加锁进行保证互斥 / 同步,所以全局 G 队列是有互斥锁进行保护的。
老调度器有几个缺点:
1.创建、销毁、调度 G 都需要每个 M 获取锁,这就形成了激烈的锁竞争。 2.M 转移 G 会造成延迟和额外的系统负载。比如当 G 中包含创建新协程的时候,M 创建了 G’,为了继续执行 G,需要把 G’交给 M’执行,也造成了很差的局部性,因为 G’和 G 是相关的,最好放在 M 上执行,而不是其他 M’。 3.系统调用 (CPU 在 M 之间的切换) 导致频繁的线程阻塞和取消阻塞操作增加了系统开销。
基于以上问题,2012年Google 的工程师 Dmitry Vyukov 在G-M模型的基础上提出了G-M-P模型
3.基于G-M-P模型的调度器
在新调度器中,出列 M (thread) 和 G (goroutine),又引进了 P (Processor)。

GMP 模型
在 Go 中,线程是运行 goroutine 的实体,调度器的功能是把可运行的 goroutine 分配到工作线程上。
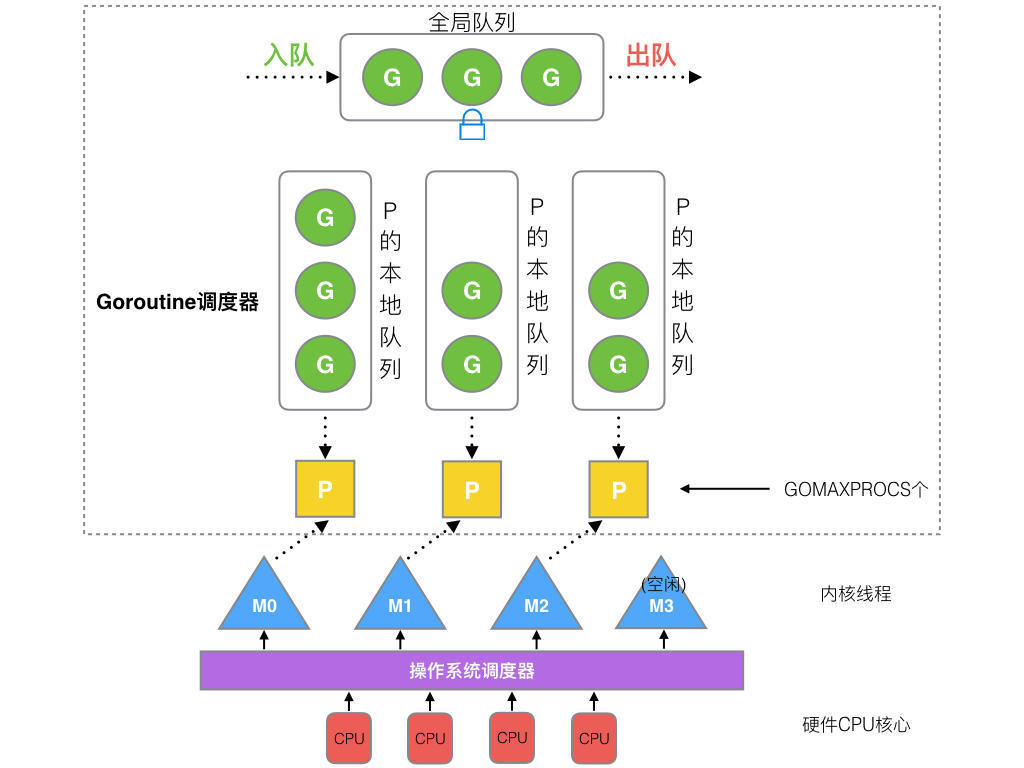
全局队列(Global Queue):存放等待运行的 G。 P 的本地队列:同全局队列类似,存放的也是等待运行的 G,存的数量有限,不超过 256 个。新建 G’时,G’优先加入到 P 的本地队列,如果队列满了,则会把本地队列中一半的 G 移动到全局队列。 P 列表:所有的 P 都在程序启动时创建,并保存在数组中,最多有 GOMAXPROCS(可配置) 个。 M:线程想运行任务就得获取 P,从 P 的本地队列获取 G,P 队列为空时,M 也会尝试从全局队列拿一批 G 放到 P 的本地队列,或从其他 P 的本地队列偷一半放到自己 P 的本地队列。M 运行 G,G 执行之后,M 会从 P 获取下一个 G,不断重复下去。 Goroutine 调度器和 OS 调度器是通过 M 结合起来的,每个 M 都代表了 1 个内核线程,OS 调度器负责把内核线程分配到 CPU 的核上执行。
运行时 G-M-P 模型中引入的处理器 P 是线程和 Goroutine 的中间层,我们从它的结构体中就能看到处理器与 M 和 G 的关系:
1 | struct P { |
处理器持有一个由可运行的 Goroutine 组成的环形的运行队列
runq(本地队列),还反向持有一个线程。调度器在调度时会从处理器的队列中选择队列头的
Goroutine 放到线程 M 上执行
第一版实现GMP模型的是Golang1.1的任务窃取调度器
任务窃取调度器
1 | static void schedule(void) { |
有关 P 和 M 的个数问题
1、P 的数量:
由启动时环境变量 $GOMAXPROCS 或者是由 runtime 的方法 GOMAXPROCS() 决定。这意味着在程序执行的任意时刻都只有 $GOMAXPROCS 个 goroutine 在同时运行。 2、M 的数量:
go 语言本身的限制:go 程序启动时,会设置 M 的最大数量,默认 10000. 但是内核很难支持这么多的线程数,所以这个限制可以忽略。 runtime/debug 中的 SetMaxThreads 函数,设置 M 的最大数量 一个 M 阻塞了,会创建新的 M。 M 与 P 的数量没有绝对关系,一个 M 阻塞,P 就会去创建或者切换另一个 M,所以,即使 P 的默认数量是 1,也有可能会创建很多个 M 出来。
P 和 M 何时会被创建
1、P 何时创建:在确定了 P 的最大数量 n 后,运行时系统会根据这个数量创建 n 个 P。
2、M 何时创建:没有足够的 M 来关联 P 并运行其中的可运行的 G。比如所有的 M 此时都阻塞住了,而 P 中还有很多就绪任务,就会去寻找空闲的 M,而没有空闲的,就会去创建新的 M。%